🙋♂️ About Me
I’m Haojia Li (李昊佳), a Ph.D. candidate in the Aerial Robotics Group at The Hong Kong University of Science and Technology, supervised by Prof. Shaojie Shen (沈劭劼) since 2021. I obtained my bachelor’s degree from Northeastern University in 2021, majoring in Robotics Engineering. Previously, I joined the ZJU Fast Lab as an research assistant, supervised by Prof. Fei GAO (高飞).
My primary research interests include robot planning and control.
📝 Publications

Impact-Aware Planning and Control for Aerial Robots with Suspended Payloads
Haokun Wang*, Haojia Li*, Boyu Zhou, Fei Gao, Shaojie Shen.(*equal contrib.)
IEEE Transactions on Robotics (T-RO), 2024.
In this paper, we propose a novel impact-aware planning and control framework that resolves potential impacts caused by motion mode switching.

AutoTrans: A Complete Planning and Control Framework for Autonomous UAV Paylaod Transportation
Haojia Li, Haokun Wang, Chen Feng, Fei Gao, Boyu Zhou, Shaojie Shen
IEEE Robotics and Automation Letters (RA-L), 2023
- A real-time planning method to generate smooth trajectories.
- An adaptive NMPC with a hierarchical disturbance compensation strategy to overcome unknown external perturbations.
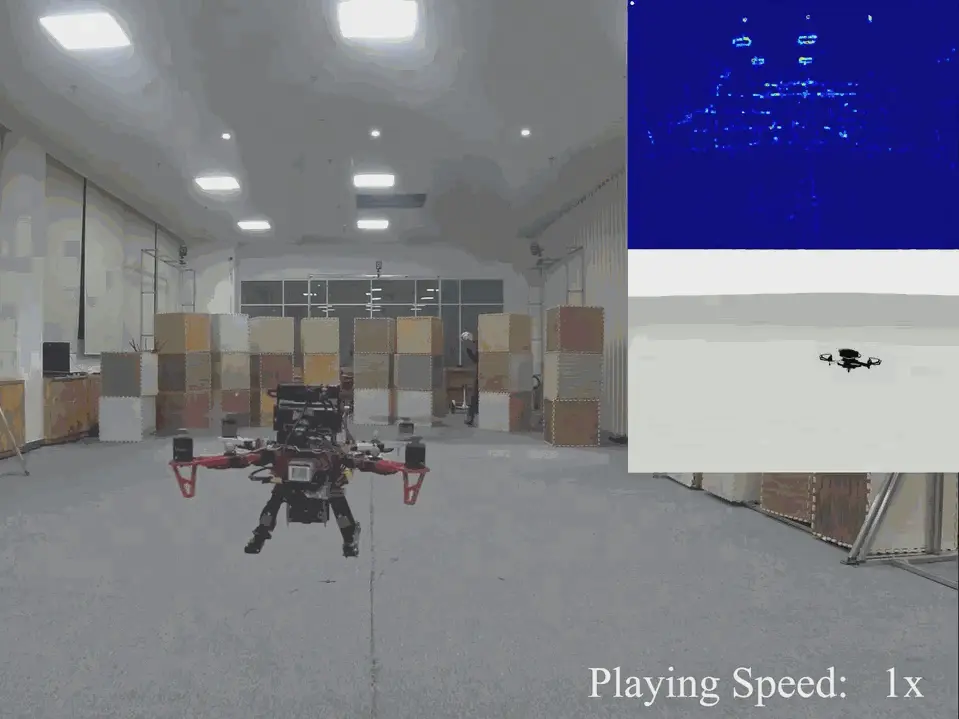
FAST-Dynamic-Vision: Detection and Tracking Dynamic Objects with Event and Depth Sensing
Botao He*, Haojia Li*, Siyuan Wu, Dong Wang, Zhiwei Zhang, Qianli Dong, Chao Xu, Fei Gao (*equal contrib.)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Event camera based low-latency fast-moving dynamic object detection, and object trajectory prediction.

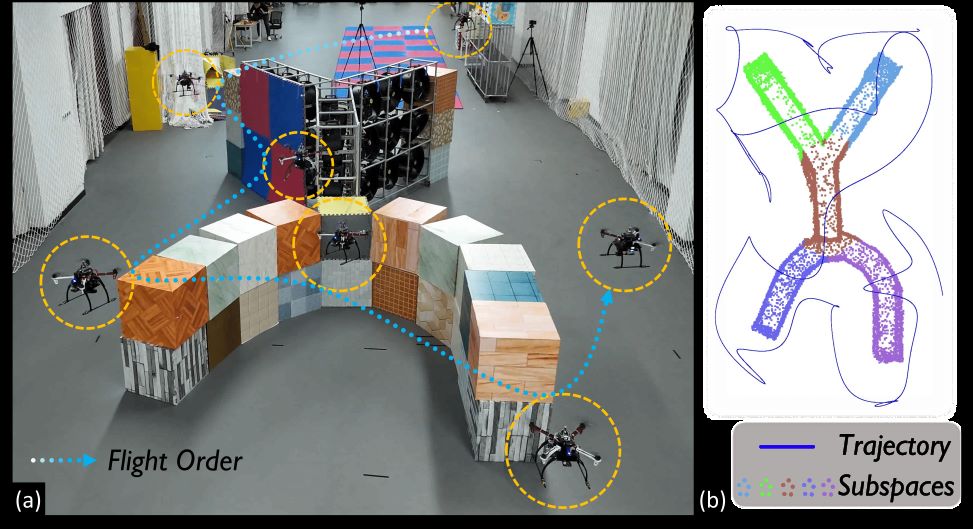
FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes
Chen Feng, Haojia Li, Mingjie Zhang, Xinyi Chen, Boyu Zhou, Shaojie Shen
IEEE International Conference on Robotics and Automation (ICRA), 2024
Best UAV Paper Award Finalist
A skeleton-guided planning framework tailored for fast coverage of large and complex 3D scenes, which results in the generation of high-quality coverage paths and high computational efficiency.

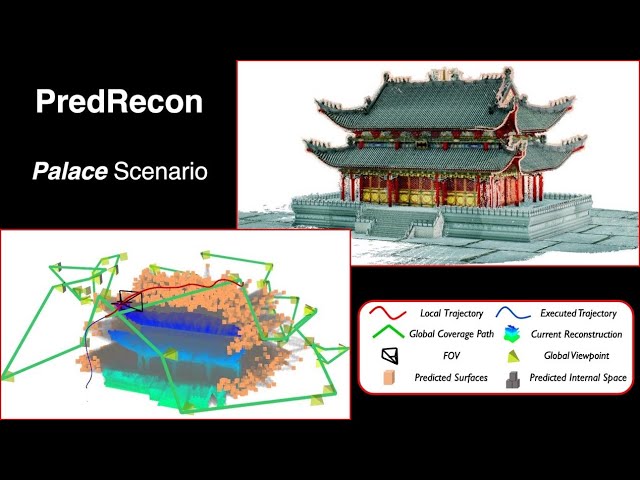
Chen Feng, Haojia Li, Fei Gao, Boyu Zhou, Shaojie Shen.
IEEE International Conference on Robotics and Automation (ICRA), 2023
A prediction-boosted planning framework that can efficiently reconstruct high-quality 3D models for the target areas in unknown environments with a single flight.

Microsaccade-inspired event camera for robotics
Botao He, Ze Wang, Yuan Zhou, Jingxi Chen, Chahat Deep Singh, Haojia Li, Yuman Gao, Shaojie Shen, Kaiwei Wang, Yanjun Cao, Chao Xu, Yiannis Aloimonos, Fei Gao, Cornelia Fermüller
Science Robotics, 2024

Swarm of micro flying robots in the wild
Xin Zhou, Xiangyong Wen, Zhepei Wang, Yuman Gao, Haojia Li, Qianhao Wang, Tiankai Yang, Haojian Lu, Yanjun Cao, Chao Xu, Fei Gao
Science Robotics, 2022

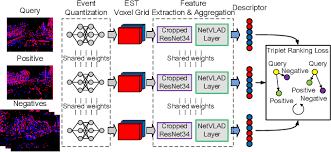
Delei Kong, Zheng Fang, Kuanxu Hou, Haojia Li, Junjie Jiang, Sonya Coleman, Dermot Kerr
IEEE Transactions on Instrumentation and Measurement (TIM), 2022
🎖 Honors and Awards
- 2021 Outstanding Graduate in Liaoning Province (Top 3%)
- 2021 Best Thesis, Northeastern University (Top 3%)
- 2020 National Scholarship, China
- 2020 President Medal, Northeastern University (Only 10 Persons)
- 2019 National 1st Prize in the National Undergraduate Electronic Design Contest, China
- 2019 National 1st Prize in the National Undergraduate Smart Car Contest, China
- 2019 National 2nd Prize in the China Robot Competition, China
📖 Educations
- 2021.09 - Present, Ph.D. Candidate, Electronic and Computer Engineering (ECE), The Hong Kong University of Science and technology (HKUST), Supervisor: Prof. Shaojie Shen
- 2017.09 - 2021.06, B.Eng, Robot Engineering, Northeastern University (NEU), Supervisor: Prof. Shiguang Wen
💻 Internships
- 2023.5 - 2024.9, Algorithm Engineer (Vehicle Mounted Drones), DJI Automotive, China